自动驾驶的潜在突破 传感器、车载集成系统与网络系统集成万字解析
自动驾驶技术正从实验室与封闭测试场,加速驶向广阔的现实道路。其最终大规模商业化落地,不仅依赖于单一技术的极致发展,更在于多个核心系统的深度融合与协同进化。当前,行业共识正逐渐聚焦于三大潜在突破点:高维感知传感器的进化与融合、高度集成的车载计算与控制平台(车载集成系统)、以及支撑海量数据流转与协同智能的车路云一体化网络系统集成。这三者如同自动驾驶的“感官”、“大脑”与“神经网络”,其协同突破将决定自动驾驶的成熟度与安全边界。
一、 感官的升维:传感器技术的突破与深度融合
自动驾驶的“感官”系统正朝着更精准、更可靠、更具冗余和成本可控的方向发展。单一传感器已无法满足全场景、全时段的感知需求,多传感器融合(Sensor Fusion)成为必然选择,而其深度与广度正在经历关键突破。
1. 激光雷达(LiDAR)的固态化与成本下探
传统机械旋转式激光雷达成本高昂且车规可靠性挑战大。固态激光雷达(包括MEMS振镜、OPA光学相控阵、Flash闪光等方案)通过取消或大幅减少机械运动部件,在提升可靠性、耐久性和生产规模的显著降低成本。随着技术成熟和量产规模扩大,性能优越的千元级车规激光雷达正在成为现实,为L3级以上自动驾驶提供不可或缺的三维高精度感知能力。
2. 4D成像毫米波雷达的兴起
传统毫米波雷达在测速、测距上表现出色,但分辨率低,无法有效识别静止物体和进行高度测量。4D成像毫米波雷达通过增加发射和接收通道,形成密集的点云,实现了对目标高度信息的感知和更精细的轮廓刻画。它在恶劣天气下性能稳定,能有效弥补摄像头和激光雷达的短板,成为感知冗余的关键一环,尤其在应对“鬼探头”、路面散落物等Corner Case方面潜力巨大。
3. 摄像头的高清化与智能化
高分辨率、高动态范围(HDR)、超低照度的摄像头是视觉感知的基础。突破点在于与AI算法的深度绑定:通过前端的ISP(图像信号处理器)进行针对性的图像优化,以及采用事件相机(Event-based Camera)等新型传感器,捕捉像素级的亮度变化,解决高速运动下的运动模糊问题,极大提升视觉感知的时效性与可靠性。
4. 深度融合算法的进化:前融合与特征级融合
早期的传感器融合多为“后融合”,即各传感器独立识别目标后再进行结果合并,易产生信息损失和冲突。未来的突破在于前融合(数据级融合)和特征级融合。前融合将原始传感器数据(如激光雷达点云和摄像头像素)在底层进行对齐与融合,再输入统一的神经网络进行识别,能最大化保留信息,提升对小目标、遮挡目标的感知能力。这要求软硬件的高度协同和强大的计算平台支持。
二、 大脑的进化:高度集成的车载计算与控制平台
海量感知数据需要被实时处理,并转化为安全的驾驶决策与控制指令。车载计算平台正从分布式ECU(电子控制单元)向集中式的域控制器(Domain Controller)和最终的中央计算平台(Central Computing Platform)演进,这是车载集成系统的核心突破方向。
1. 从域融合到中央计算:硬件架构的革新
传统汽车拥有上百个独立的ECU,算力分散,通信复杂。域控制器(如智驾域、座舱域、车身域)将功能相近的ECU整合,初步实现了算力集中。下一步是跨域融合,将智驾、座舱甚至车控功能整合进少数几个高性能计算单元(HPC),最终迈向单一中央计算机。这种架构能极大降低系统复杂度、线束成本,实现算力的灵活分配和OTA升级的统一管理。
2. 异构计算与AI专用芯片
自动驾驶计算任务多样,包括图像处理(GPU擅长)、AI推理(NPU/TPU擅长)、规则计算与控制(CPU擅长)。因此,采用CPU+GPU+NPU等构成的异构计算SoC(系统级芯片) 成为主流。突破点在于:提升AI算力(TOPS)的更关注有效算力、能效比(TOPS/W)以及芯片内部数据吞吐带宽。芯片设计需与算法模型深度耦合,进行软硬件一体化优化。
3. 功能安全与预期功能安全(SOTIF)的体系化集成
车载集成系统不仅是算力的集成,更是安全体系的集成。除了满足最高等级(ASIL-D)的功能安全(ISO 26262)要求,还需应对因传感器局限、算法不足导致的预期功能安全(SOTIF, ISO 21448)挑战。这意味着平台需要在硬件冗余(如双芯片备份)、软件架构(如微服务化、容器化)、安全监控机制等方面进行系统性设计,确保在部分系统失效或遇到未知场景时,车辆能降级或进入安全状态。
三、 神经网络的扩展:车路云一体化网络系统集成
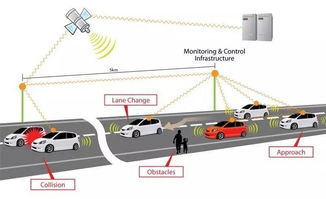
单车智能存在感知距离有限、受环境遮挡等天然瓶颈。将车辆融入更广阔的“网络系统”,即车路云一体化,通过车与车(V2V)、车与路(V2I)、车与云(V2C)的实时通信,实现超视距感知、群体智能和全局优化,这是突破自动驾驶规模应用天花板的关键。
1. 车联网通信技术的协同:C-V2X与5G/5.5G
基于蜂窝网络的C-V2X(包括LTE-V2X和更先进的5G NR-V2X)技术,能提供低时延、高可靠、大带宽的通信能力。5G网络支持下的远程遥控驾驶、高精地图实时下发、传感器数据共享( Collective Perception)成为可能。5.5G(5G-Advanced)将进一步增强上行带宽、定位精度和可靠性,为自动驾驶提供堪比专网的通信质量。
2. 路侧智能基础设施(RSU)的规模化部署
在关键路口、高速公路路段部署集成多种传感器(摄像头、毫米波雷达、激光雷达)和计算单元的路侧单元(RSU),构成“上帝视角”。RSU能将融合处理后的结构化信息(如信号灯状态、盲区行人位置、全路口交通流)实时广播给车辆,极大扩展单车感知范围,解决十字路口冲突、大车遮挡等经典难题。其突破点在于降低成本、统一接口标准、实现与云平台的高效协同。
3. 云端大数据平台与AI训练闭环
云端构建的大数据平台负责收集海量车队运行的脱敏数据,特别是自动驾驶遇到的长尾难题(Corner Case)数据。利用云端的无限算力,可以高效地进行AI模型的重新训练、仿真测试和验证。更新后的模型再通过OTA下发到车端,从而实现自动驾驶系统能力的持续、快速迭代,形成“数据采集-模型训练-部署优化”的完整闭环。云平台也支撑高精地图的众包更新与动态交通调度。
4. 网络安全的系统性集成
车、路、云全面互联后,网络安全(Cyber Security)成为生命线。必须建立从芯片、车载系统、通信链路到云端的全方位、纵深防御体系,包括安全启动、通信加密、入侵检测与防御、安全OTA等,确保自动驾驶网络系统不被攻击和恶意操控。
结论:协同突破,方致千里
自动驾驶的终极突破,并非传感器、计算平台或网络技术任何一方的单点突进,而是三者作为一个有机整体的协同演进与深度集成。
- 传感层提供更丰富、更可靠、成本更优的原始数据;
- 车载集成系统作为核心枢纽,以极高的能效和安全性处理数据,做出即时决策;
- 网络系统集成则将单车智能升维为群体智能和系统智能,突破物理限制,实现全局安全与效率最优。
成功的自动驾驶解决方案供应商,必然是能够打通这三大层次,实现“传感-计算-通信”全栈技术垂直整合与软硬件一体化的企业。这场围绕“感知、决策、协同”的深度集成竞赛,将最终决定谁能在自动驾驶的规模化商业落地浪潮中引领风骚。
如若转载,请注明出处:http://www.huipiho.com/product/86.html
更新时间:2026-06-19 10:57:28